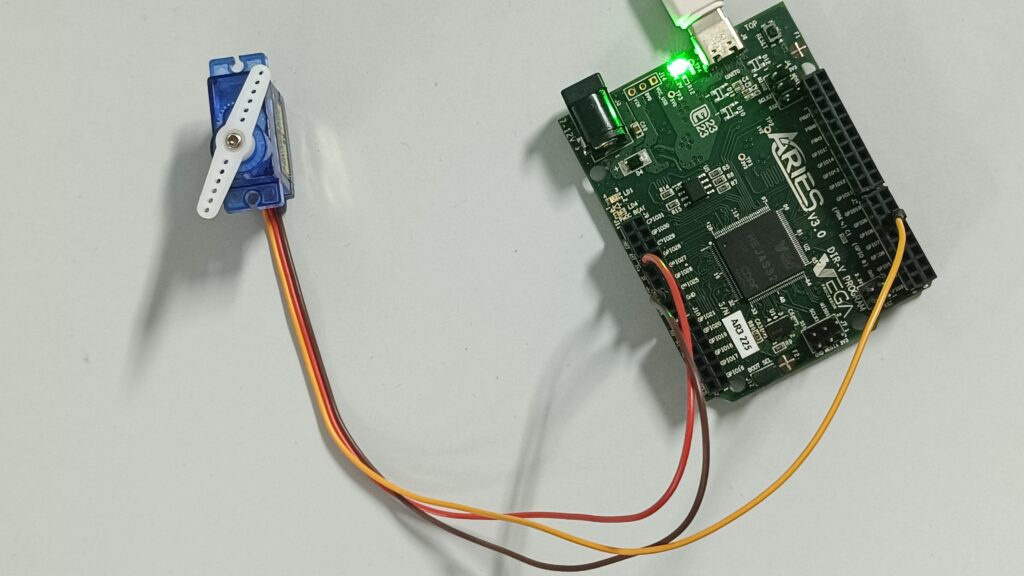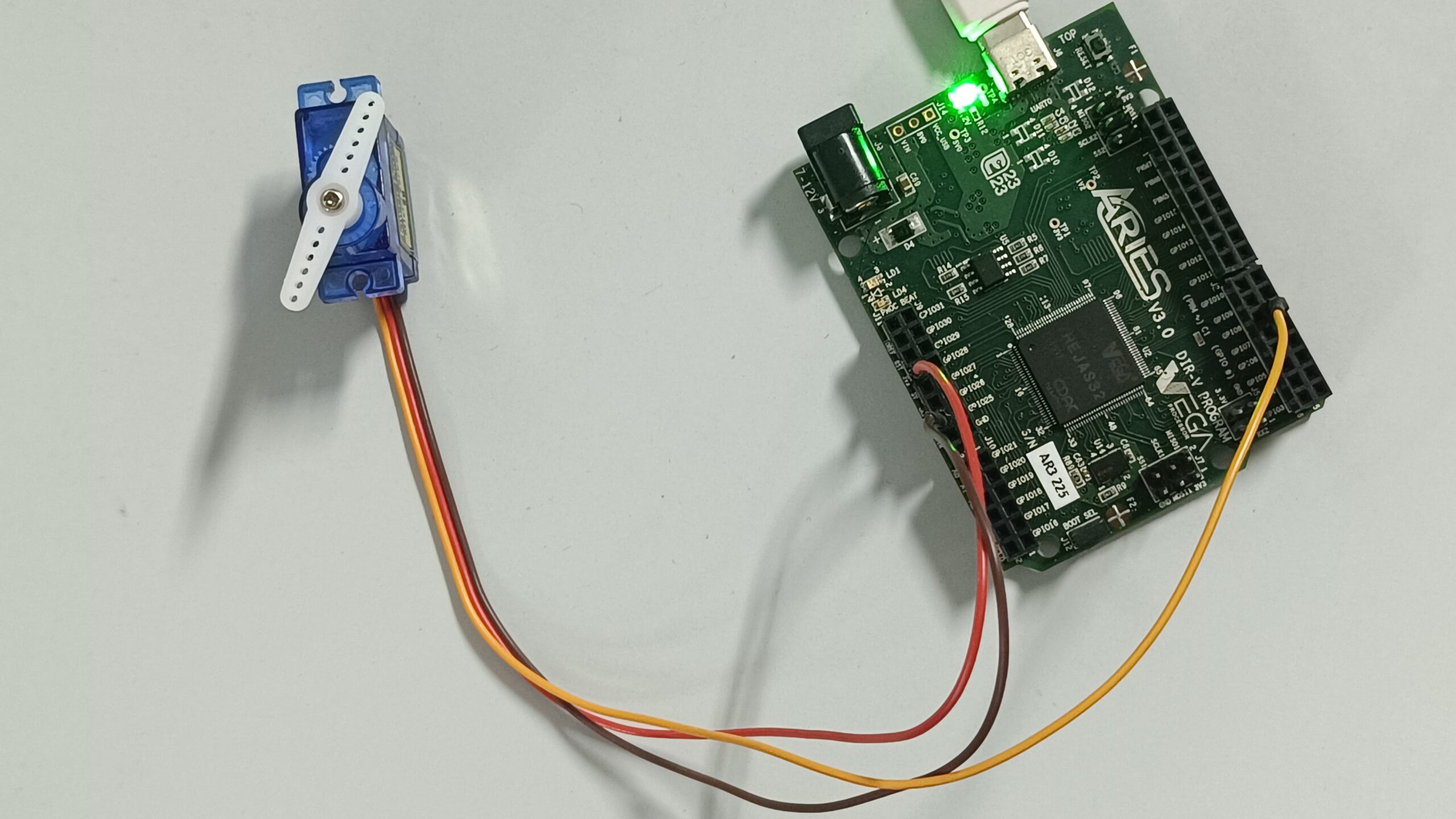
This tutorial will give you an idea as to how you can connect and control servo motors with ARIES v3.0 board. Micro Servo Motor SG90 is used here.
Servo motors
A servo motor is a device that contains an encoder which converts the mechanical motion (turns of the shaft) into digital pulses interpreted by a motion controller. It also contains a driver; and in conjunction, they make up a circuit that governs the position, torque and speed.
Their main specifications are torque and speed.
Servo motors are considered to be fundamental in the design and manufacturing of robots. These are systems that require precise and controlled mechanical positioning. We can see them in fields such as industrial automation or the growing robotic surgery field.

ARIES v3.0
The ARIES v3.0 is a fully indigenous and a “Made in India” product to get started with basic microprocessor programming and embedded systems. This board is built upon a RISC-V ISA compliant VEGA Processor with easy-to-use hardware and software. For more details about ARIES v3.0 boards please refer to the ARIES development boards and Ecosystem.
Prerequisites
- Windows 10 or above/Linux (64 bit)
- Arduino IDE
- VEGA ARIES Board support package
Components Required
- ARIES v3.0 Board
- USB type C to USB type A cable
- Servo Motor
- Jumper Wires
Circuit Diagram
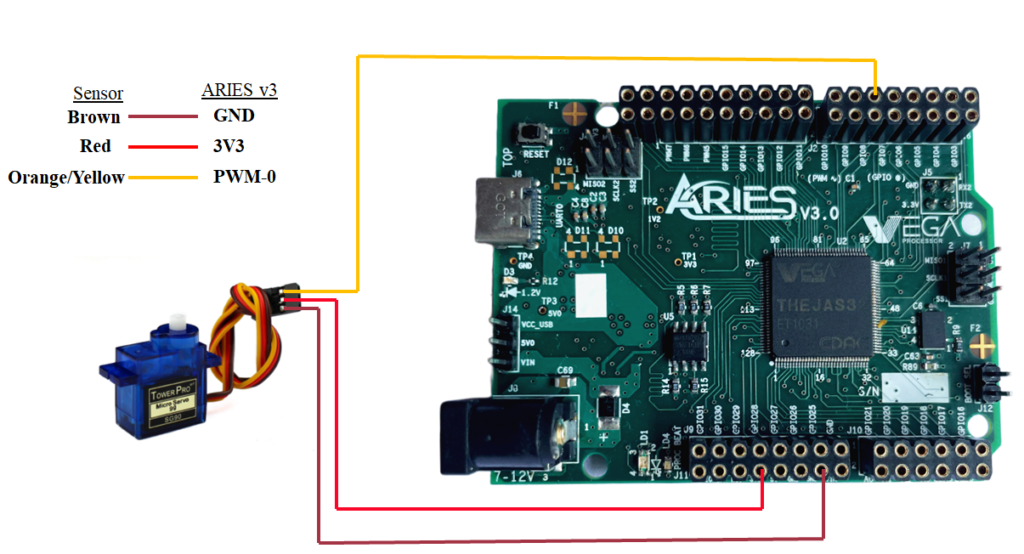
Connections:
| Servo Motor | ARIES V3 board |
| Brown (GND) | GND |
| Red (VCC) | 3V3 |
| Orange/Yellow (Out) | PWM-0 |
Procedure
Open and set up the Arduino IDE as described in Getting Started with ARIES v3.0.
- Make sure you have selected ARIES v3 Board from Tools -> Board -> VEGA Processor: ARIES Boards -> ARIES v3
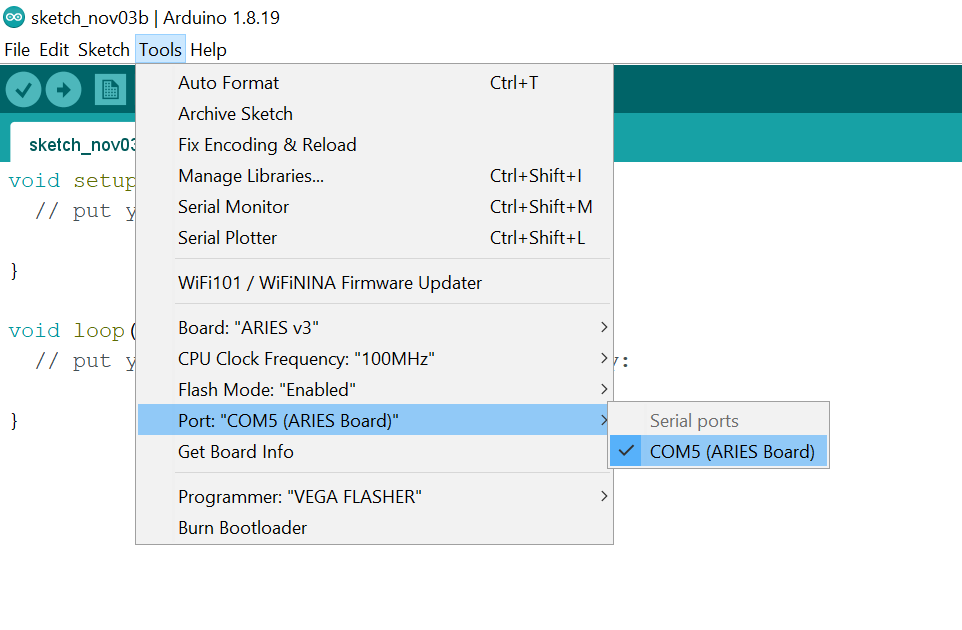
- Select Tools -> Flash Mode -> Enabled
- Select Programmer as VEGA FLASHER from Tools -> Programmer -> VEGA FLASHER
- Also select appropriate port from Tools -> Port -> COM* (ARIES Board)
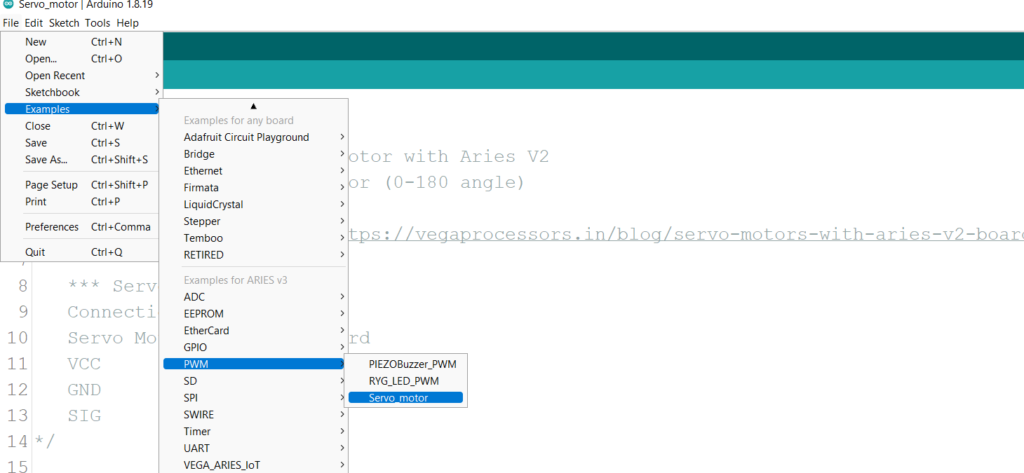
Now, Open Files -> Examples -> Under Examples for ARIES v3 -> PWM-> Servo_motor
Finally Upload the code to ARIES v3.0 board
Output
Once the code is uploaded, you can see the servo motor rotating(0-180 angle)